自動車の自動運転技術は、近年様々な企業、研究機関、大学において精力的な研究・開発が行われています。実用化段階に入った自動運転技術の研究の推進ために、大学の研究室としてどのような貢献していくべきか模索しながらテーマを設定し、教員・学生が一体となって研究に取り組んでいます。
最近の研究
PCによりハンドル、アクセル、ブレーキ、シフトレバー、ウィンカー等を制御可能な市販乗用車ベースの自動運転車や,小型EVをベースとした実験車を活用して自動運転に関わる技術的課題についてテーマを設定して研究を進めています。特に最近は、湘南藤沢キャンパスの構内のシャトルバスの自動運転や、ラストマイル自動運転(駅から自宅、自宅から病院などへ短距離移動を支援し、高齢化が進む地域の生活の質の向上や、観光地の活性化をもたらす技術として期待されている低速の完全自動運転の運用,制御技術の研究に力を入れています。また、実験車を複数有している点を生かし、自動運転車同士の協調技術の研究もやってきました。(最近やっていませんが・・・)。
近年に取り組んでいる(いた)主な研究テーマは、
・湘南藤沢キャンパスのシャトルバスの自動運転
・ラストマイル自動運転の実証実験
・オーストラリア(メルボルン)での準天頂衛星活用した公道実証実験
・ドライバと自動車、自動車と自動車の共進化を実現する高度運転支援技術の開発(スズキ財団課題提案型助成テーマ)
・空間情報を介した自動運転車の協調走行技術の研究
・自律自動運転システムの研究
・サービスエリア等での路車協調型速度制御技術の研究
などです。
下の動画は、湘南藤沢キャンパスの自動運転シャトルバスの紹介動画(2023年版)です。
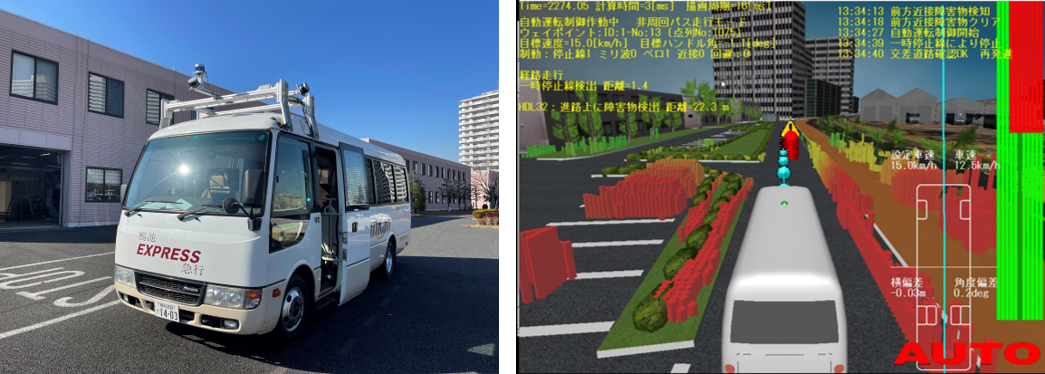
下の写真は、開発着手当時の改造中のシャトルバスと車内の制御PC画面です。
 下の写真は、乗用車ベースの実験車と走行の様子です。
下の写真は、乗用車ベースの実験車と走行の様子です。
昔の研究
大前研究室では、2001年に、乗用車にアクチュエータを組み込んだ改造車によるキャンパス内で発進から駐車まで行う自動運転システムを構築し、その後、様々なテーマの研究を行ってきました。主には、
・自動運転車の運動制御に関するもの(操舵制御の手法など)
・自動運転時のドライバ挙動、オーバーライド、手動/自動の切り替えに関するもの
・省エネ走行制御に関するもの(交差点のノンストップ走行など)
などです。
また、自動運転の運用形態として、オンデマンド型自動運転(呼べば迎えに来て、目的地に連れていき、使い終われば自動的に去っていく、無人タクシーのような自動運転)の研究に力を入れていました。オンデマンド型自動運転については、2008年に宮城県栗原市で実証実験を行い、2011年に東京モーターショーでデモンストレーションを行いました。
下の写真は宮城県栗原市の実証実験の様子(左、中)、東京モーターショー2011のデモの自動発進の様子です。
