自動車の遠隔操作技術は、従来は注目されていませんが、近年では、自動運転による移動サービスの運用において、自動車の遠隔監視・操作技術は重要な要素となっています。大前研究室では、2003年頃に、自動運転中のドライバ挙動を安全に評価するために乗用車の遠隔操作システムを構築して以来、小型電気自動車、電動車いす等の遠隔操作システムを構築してきました。また、操作側も自動化された遠隔操作、すなわち、インフラが自動車を検出・認識して誘導するインフラ誘導型自動運転システムを構築、実証しました。近年は、自動運転バスなどのラストマイル自動走行のための、遠隔監視・操作技術研究を行っています。
主な研究テーマは
・ラストマイル自動走行システムのための遠隔監視、遠隔操作技術の開発
・遠隔操作の映像遅延の補償、送信データの低減に関する研究
・インフラからの車両誘導制御の研究
・遠隔操縦を用いた自動運転システムの評価
です。
下の写真は、永平寺町の自動運転移動サービスの遠隔監視・操作室(左)と新川崎タウンキャンパスに構築中の遠隔監視・操作技術の評価のための遠隔監視・操作室(右)です。

下の写真は、インフラ誘導型自動運転システムの写真です。右側は、地上に設置したライダー(レーザー光で周囲物体の距離を計測するセンサ)で自動車を認識して障害物がある走路を誘導している様子です。左側は、建物屋上に設置したカメラで小型電気自動車を認識して、周回路を走行するように誘導している様子です。

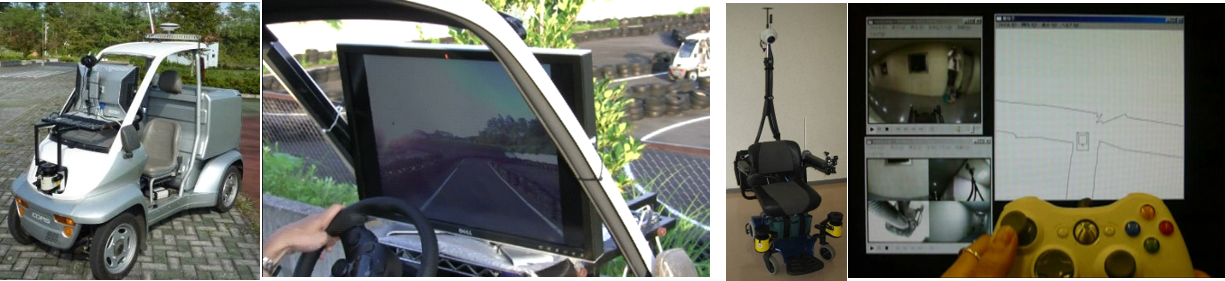
下の写真は、小型電気自動車を使った遠隔操縦評価システム(左)、電動車いすの遠隔操縦システム(右)です。